



 本文介绍了如何进行BET分析,涉及氮气吸脱附实验数据、BET比表面积计算、孔容区分、平均孔径估计以及吸脱附曲线和孔径分布的解释。涵盖了BET模型的应用、微孔和大孔的区别以及不同类型的吸附等温线特征。
本文介绍了如何进行BET分析,涉及氮气吸脱附实验数据、BET比表面积计算、孔容区分、平均孔径估计以及吸脱附曲线和孔径分布的解释。涵盖了BET模型的应用、微孔和大孔的区别以及不同类型的吸附等温线特征。
物理吸附提供了测定催化剂表面积、平均孔径及孔径分布的方法(一般而言指N2吸脱附实验)。
在进行氮气吸脱附表征的时候一般会给出如下数据:氮气吸脱附曲线(Nitrogen adsorption-desorption isotherm),孔容(pore volume),孔径分布图(pore size distribution),平均孔径(average pore diameter)。
那么如何对报告进行BET分析呢?
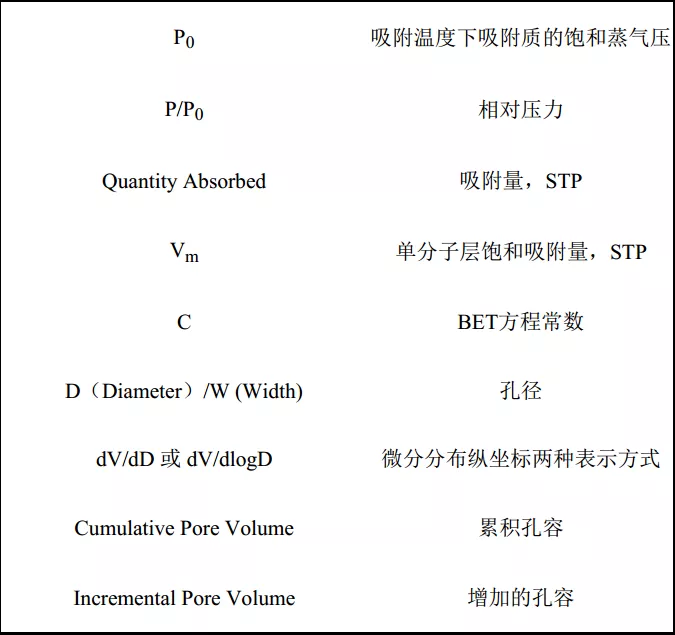
1.分析报告中常用名词
2.报告总图(summary report)
2.1 BET比表面积(BET surface area)
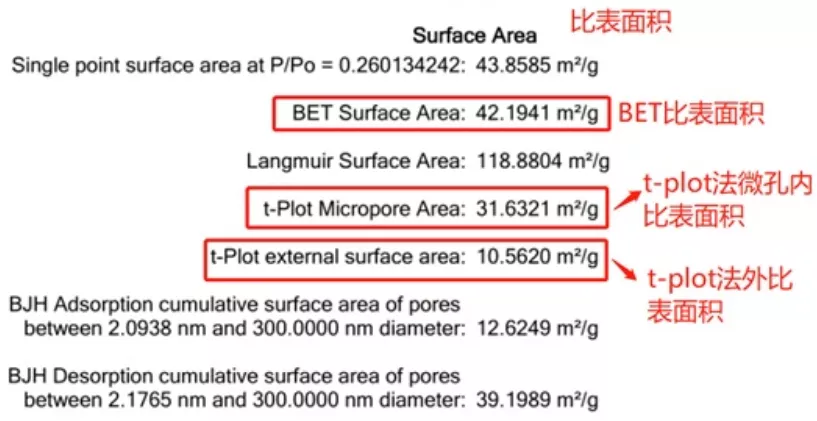
使用不同的计算模型得到的比表面积有所不同,使用BET计算模型得到的比表面积是目前使用最普遍的。
2.2 孔容
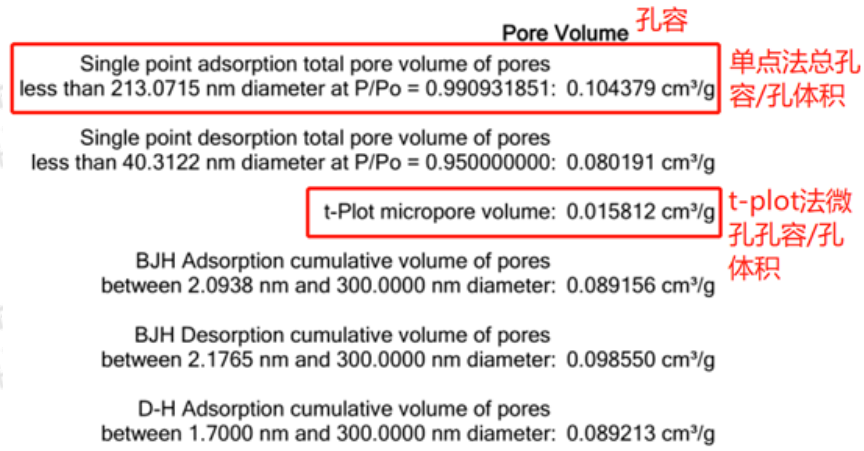
总孔容减去微孔孔容可以得到介孔和大孔孔容,当大孔孔容贡献较小的时候,可以近似为介孔孔容:Vmes+Vmac=Vtotal-Vmic≈Vmes,使用压泵法可以得到较为准确的大孔孔容。
2.3 平均孔径
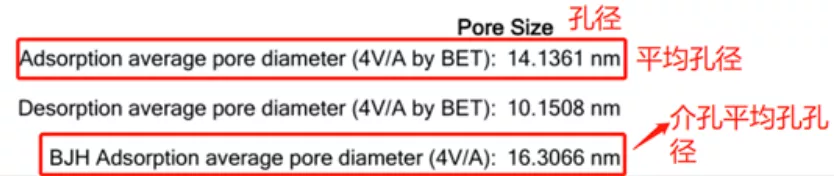
平均孔径的计算是基于孔都是圆柱形孔结构的假设来计算的,一般使用BJH方法来计算脱附枝曲线。
3.曲线的作图分析
3.1 吸脱附曲线
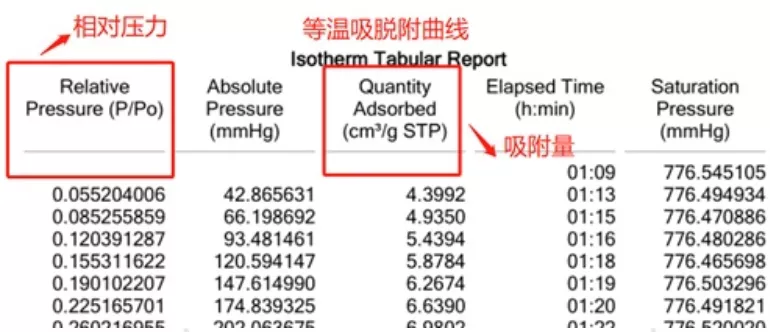
找到对应的isotherm tabular report数据,并将这两列数据导入origin里面作图就可以得到吸脱附曲线。
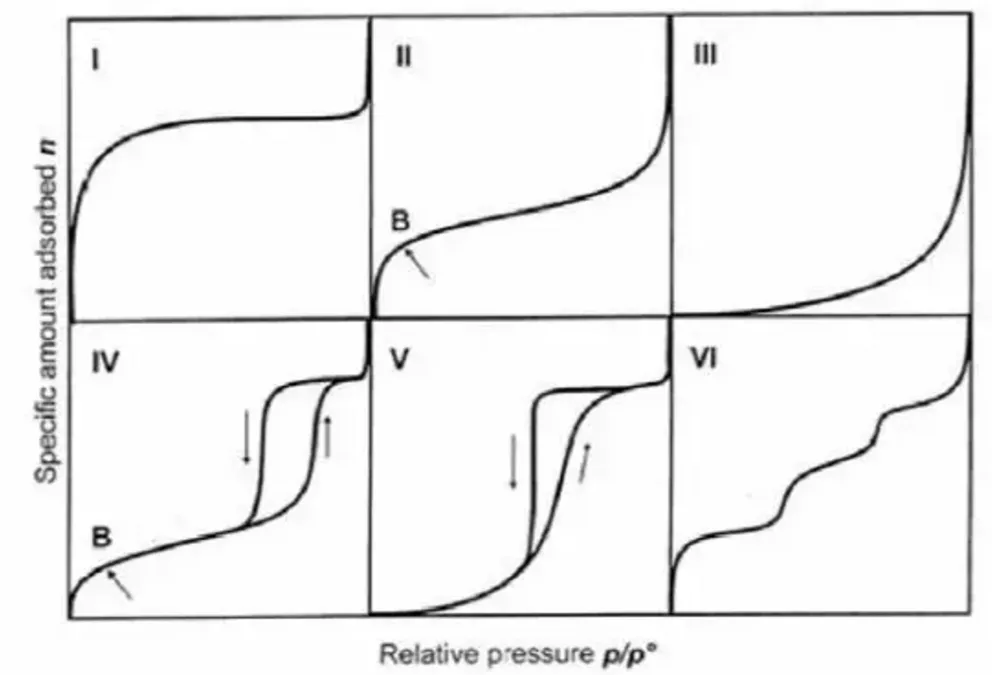
上图是不同吸附等温线的类型,I型等温线在较低的相对压力下吸附量迅速上升,达到一定相对压力后吸附出现饱和值。一般,I型等温线往往反映的是微孔吸附剂(分子筛、微孔活性炭)上的微孔填充现象。
II型等温线反映非孔性或者大孔吸附剂上典型的物理吸附过程。III 型等温线十分少见。VI型等温线是一种特殊类型的等温线,反映的是无孔均匀固体表面多层吸附的结果。
IV型等温线与II型等温线类似,但曲线后一段再次凸起,且中间段可能出现吸附回滞环,其对应的是多孔吸附剂出现毛细凝聚的体系。
回滞环多见于IV型吸附等温线,根据最新的IUPAC的分类,有以下六种(1985年的标准主要是H1H2aH3H4这四种)
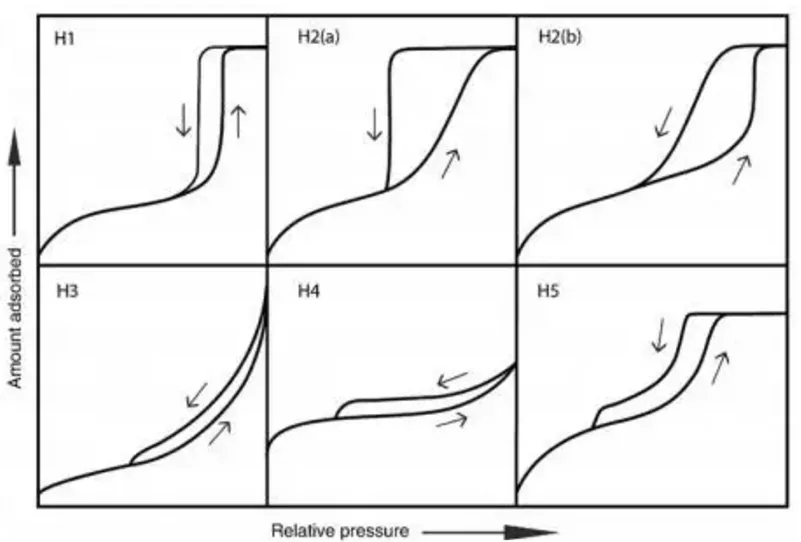
H1和H2型回滞环吸附等温线上有饱和吸附平台,反映孔径分布较均匀。H1型迟滞回线可在孔径分布相对较窄的介孔材料,和尺寸较均匀的球形颗粒聚集体中观察到。
而H2型反映的孔结构复杂,可能包括典型的“墨水瓶”孔、孔径分布不均的管形孔和密堆积球形颗粒间隙孔等。H2a型回滞环常见于硅凝胶以及一些有序三维介孔材料,比如说SBA-16KIT-5。
H2b型相对于H2a型来说,孔颈宽度(neck width)的尺寸分布要宽得多,常见于介孔泡沫硅(MCFs)和一些经过水热处理后的有序介孔硅材料。
H3和H4型回滞环等温线没有明显的饱和吸附平台,表明孔结构很不规整。
3.2 孔径分布
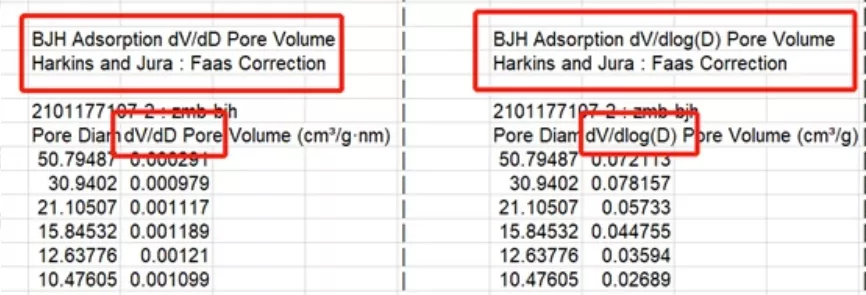
BJH方法吸脱附孔径分布原始数据,一般用dV/dD(或者dlogD)来作图,一般来说,孔径分布图应该以脱附曲线为准(desorption),查看dV/dD以及dV/dlogD图;
由于采用对数形式,通常dV/dlogD的曲线编号幅度要更明显,因此孔径分布图应优先看脱附曲线dV/dlogD,其次可以结合脱附曲线dV/dD,但是如果脱附曲线孔径分布出现3.8nm强峰,则要以吸附曲线 的dV/dD以及dV/dlogD为准。
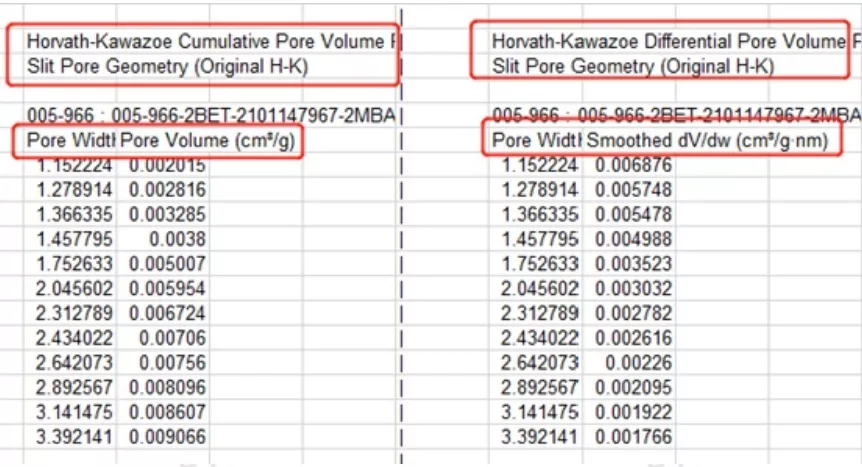
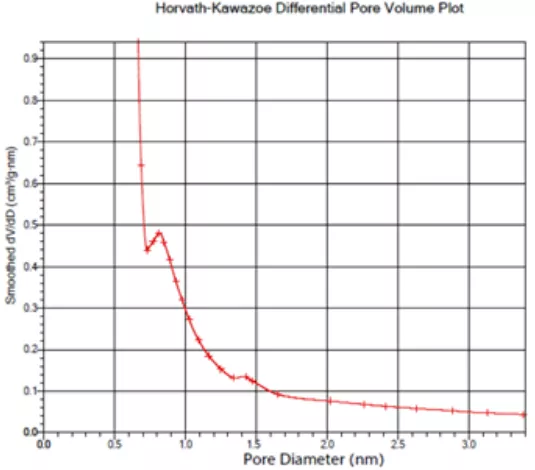
3.3 微孔部分孔径分布
HK孔径分布:HK方法可以得到微孔部分的孔径分布。纵坐标最高点对应的孔径为微孔范围内样品最集中的孔的尺寸。
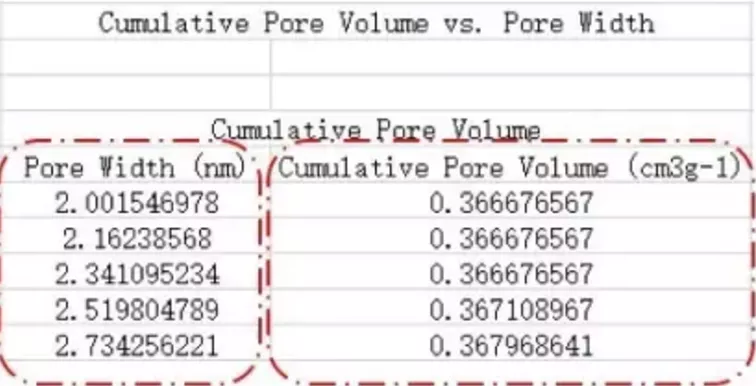
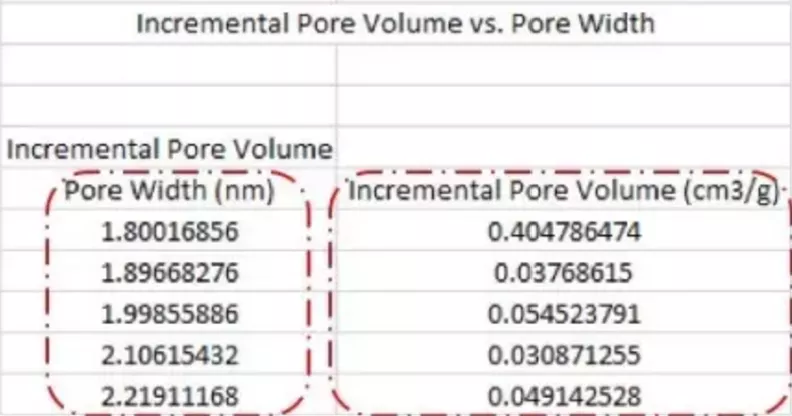
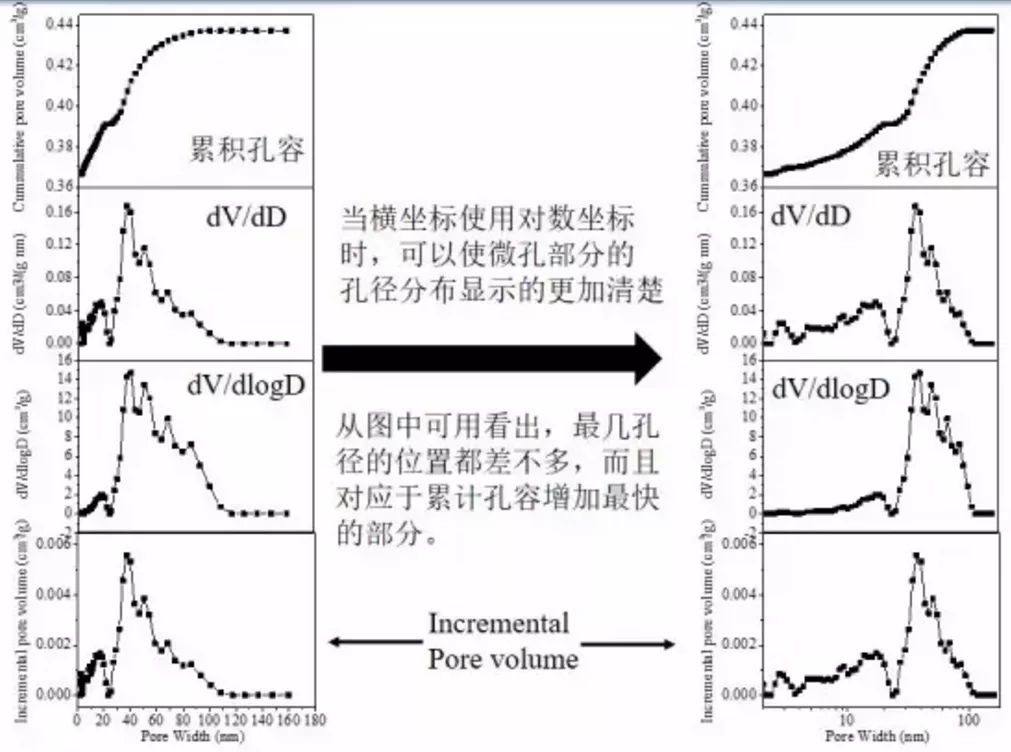
3.4 累计孔容图(cumulative pore volume)
通过累计孔容图可以知道相应孔径对孔容的贡献,也可以直接通过对incremental pore volume得出对应孔径贡献孔容的大小。两种作图分析方法分别如下图所示:
将不同的孔径分布作图方式列举在一起,有一个直观的印象。
更多科研干货教程,可以点击下面链接获取哦~


















 1万+
1万+


 到【灌水乐园】发言
到【灌水乐园】发言








