
自动化专业
详细内容
本人作为一位知乎深度回答爱好者,将力求从各个层次对“自动化”予以尽可能客观的评价,给各位知友一些建议与看法。
(PS:更新一下,关于具体的学科排名如下https://www.cdgdc.edu.cn/xwyyjyxx/xkpgjg/ )
这次的问题(Quesiton):
「自动化」专业是一门怎样的专业?
- 「自动化」专业的主要课程有哪些?
- 开设院校及专业排名是怎样的?
- 就业方向和发展前景如何?
对于自动化我们先来看看它四年的教学计划
1⃣️通识通修课程模块
- 通识课
- 思想政治理论课
- 军事技能课
- 分层次通修课
2⃣️学科专业课程模块
- 学科平台课
- 专业核心课
3⃣️开放选修课程模块
- 专业选修课(含一级学科选修课,跨学科选修课等)
(来源:自动化专业主要教学模块设置)
公共课,比如思修、毛概、大英、高数之类的直接忽视,因为除了自动化以外大部分理工科专业的课程安排都已经包括,所以不多说,说下,自动化独有的。
自动化是一个以“电”为主的纯工科专业,而“电”又分为强电和弱电,自动化是强电和弱电结合的,换句话说自动化就是一个“电”的大熔炉,把与电有关的都融合在一起,彼此相互依存。
强电与弱电科普:
强电与弱电是相对的概念,从概念上讲,主要区别是用途的不同,而不能单纯的以电压大小来界定两者关系(如果非要指定用电压区分的话,那就把36V(人体安全电压)以上划定为强电36V(人体安全电压)以下为划定为弱电。) ,两者既有联系又有区别,一般区分原则是:强电的处理对象是能源(电力),其特点是电压高、电流大、功率大、频率低,主要考虑的问题是减少损耗、提高效率,弱电的处理对象主要是信息,即信息的传送和控制,其特点是电压低、电流小、功率小、频率高,主要考虑的是信息传送的效果问题,如信息传送的保真度、速度、广度、可靠性。它们大致有如下区别:
(1)交流频率不同
强电的频率一般是50Hz(赫),称“工频”,意即工业用电的频率:弱电的频率往往是高频或特高频,以KHz(千赫)、MHz(兆赫)计。
(2)传输方式不同
强电以输电线路传输,弱电的传输有有线与无线之分。无线电则以电磁波传输。
(3)功率、电压及电流大小不同
强电功率以KW(千瓦)、MW(兆瓦)计、电压以V(伏)、KV(千伏)计,电流以A(安)、kA(千安)计;弱电功率以W(瓦)、mW(毫瓦)计,电压以V(伏)、mV(毫伏)计,电流以mA(毫安)、uA(微安)计,因而其电路可以用印刷电路或集成电路构成。
强电中也有高频(数百KHz)与中频设备,但电压较高,电流也较大。由于现代技术的发展,弱电己渗透到强电领域,如电力电子器件、无线遥控等,但这些只能算作强电中的弱电控制部分,它与被控的强电还是不同的。
根据弱电传导信号,强电传导电能的根本原则,我们很容易就可以把强电与弱电区分开来了。比如,虽然电动剃须刀、手电筒等用电只是两节干电池(3V),但我们不能因为用电器电压电流小,就认为是弱电类,因为传导的是电能而不是信号,所以应该属于强电类。
由上面描述,四者间的关系可以大概的这么阐述:
高压一定包括强电,强电不一定属于高压;
低压一定包括弱电,弱电一定属于低压;
低压不一定就是强电,强电不一定就是低压。
(来源:百度百科)
具体的专业课程安排:
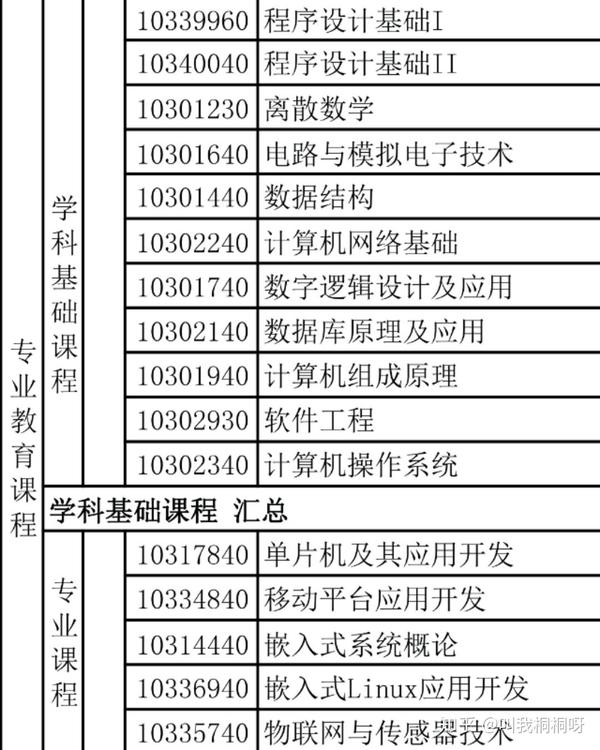
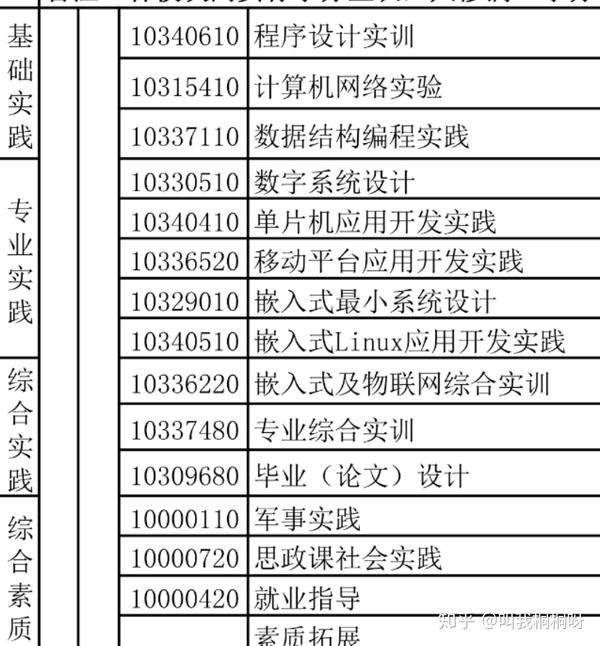
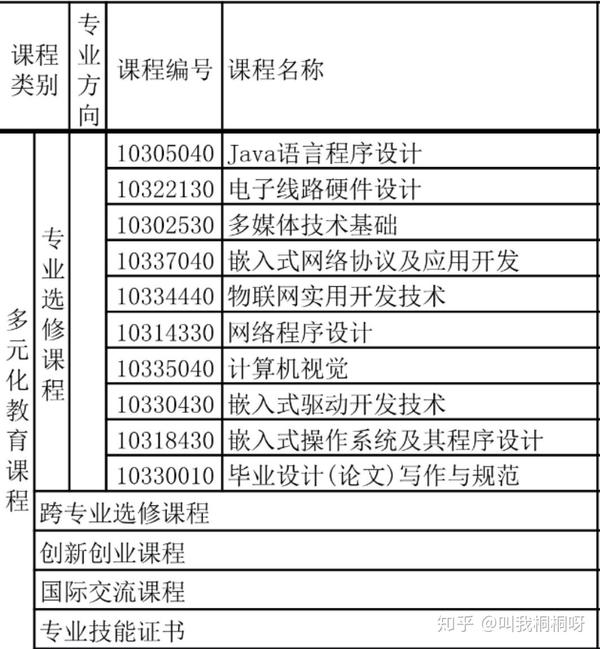
PS:最最最最最核心的课程————《自动控制原理》
自动控制原理包括:《经典控制理论》和《现代控制理论》
自动控制原理里面最最最最重要的重点————“反馈、稳定、误差“
另外,需要补充的是每个学校的特色不同,因而课程安排上会有所偏重。举个栗子 ,我是电子科技大学的那么我们专业的课程安排上会更多的往弱电,像那些电子电路设计或者信号传输或者产生方面靠,而如果是华南理工大学,那么他的强势学科是强电也就是电气工程,那么他的主要课程会往强电和电力变换,电力处理方面靠。
开设的院校和专业排名
自动化专业推荐院校

(PS:更新一下,关于具体的学科排名如下https://www.cdgdc.edu.cn/xwyyjyxx/xkpgjg/ )
对于学校而言,其实还是一句话看特色是什么,他这个自动化的偏向程度是怎样的,他的教学目标是怎样的,这些都很重要,也不要盲目看排名。
PS: 适当的时候还是要看看排名,特别是学科排名,比如A或者B之类的,还有是否是双一流建设学科(原谅我不要脸得又说排名重要)
在说以后的发展之前,我觉得很有必要科普一下“自动化”的发展史(一个无数人前仆后继的血泪史!!!)
自动控制技术发展史
从远古的漏壶计时,到公元前的水利枢纽工程;从中世纪的钟摆、天文望远镜,到工业革命的蒸汽机;从百年前的飞机、汽车和电话,到八十多年前的电子放大器、模拟计算机;从二战期间的雷达、火炮防空网,到冷战时代的卫星、导弹和数字计算机;从六十年代的登月飞船,到现代的航天飞机、宇宙和星球探测器。这些著名的科技发明直接催生和发展了自动控制技术。源于实践,服务于实践,在实践中升华,经过千百年的提炼,尤其是近半个世纪工业实践的普遍应用,自动控制技术已经成为人类科技文明的重要组成部分,在日常生活中不可或缺。
自动控制技术的历史分成早期控制、经典控制、现代控制三个阶段,各个时期诞生都伟大控制理论、控制方法、控制装置与控制学家。
早期控制
早在古代,劳动人民就凭借生产实践中积累的丰富经验和对反馈的直观认识,发明了许多着闪烁控制理论智慧火花的杰作。如果要追溯自动控制技术的发展史,早在两千年前人类就有了自动控制技术的萌芽。
1)公元前1400至公元前1100年,中国、埃及和巴比伦相继出现了可自动计时的漏壶。
2)公元前300年左右,李冰父子主持修筑的都江堰水利工程充分体现了自动控制系统的观念,是自动控制原理的典型实践。
3)100年左右,亚历山大的希罗发明了开闭庙门和分发圣水的自动装置。
4)132年,东汉杰出天文学家张衡发明了水运浑象仪,研制出了自动测量地震的候风地动仪。
5)235年,汉朝时期最负盛名的机械发明家马钧研制出了用齿轮传动的自动指示方向的指南车。
6)1637年,明末科学家宋应星所著的《天工开物》记载了有程序控制思想的提花织机结构图。
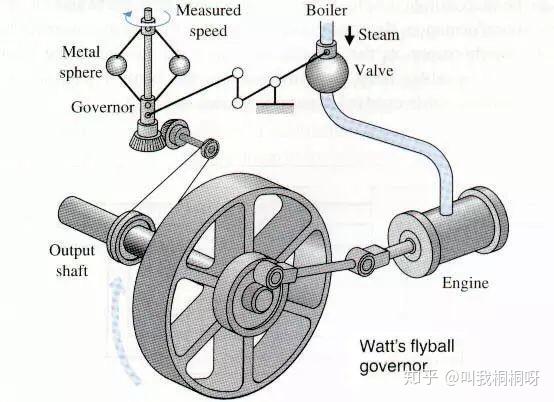
7)1788年:第一次工业革命的重要人物、英国发明家James Watt发明了飞球调节器,用来控制蒸汽机的转速。
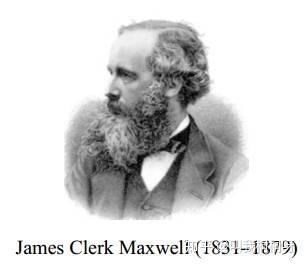
8)1868年,英国物理学家James Clerk Maxwell (1831–1879)在Proceedings of Royal Societyvol. 16 (1867–1868)上发表了著名论文“On Governors”,通过对调速系统线性常微分方程的建立和分析,解释了瓦特蒸汽机速度控制系统中出现的剧烈振荡的不稳定问题,提出了二阶、三阶系统的稳定性代数判据,开辟了用数学方法研究控制系统的途径。
9)英国数学家Edward John Routh (1831—1907)与德国数学家Adolf Hurwitz (1859—1919)把Maxwell的思想扩展到高阶微分方程描述的更复杂的系统中,分别在1877年和1895年各自提出了直接根据代数方程的系数判别系统稳定性的准则两个著名的稳定性判据—劳斯判据和胡尔维茨判据,即著名的Routh-Hurwitz稳定性判据。

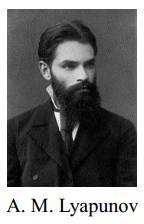
10)1892年,俄国数学家Aleksandr Mikhailovich Lyapunov(1857—1918)完成了博士论文“论运动稳定性的一般问题”,提出了常微分方程运动稳定性理论,随后被引入了控制理论。
经典控制
从20世纪初开始,经典控制理论使科技水平出现了巨大的飞跃,工业、农业、交通及国防的各个领域都广泛采用了自动化技术。二战期间,反馈控制被广泛用于飞机自动驾驶仪、火炮定位系统、雷达天线控制系统以及其他军用系统。这些系统的复杂性和对快速跟踪、精确控制的高性能追求,迫切要求拓展已有的控制技术。同时,还促进了对非线性系统、采样系统以及随机控制系统的研究。可以说工业革命和战争促使了经典控制理论的发展。
1)1913年,美国福特汽车公司建成了世界上最早的汽车装配流水线。
2)1922年,俄裔美国科学家Nicholas Minorsky (1885-1970)研制出了用于美军船舶驾驶的伺服结构,首次提出了经典的PID控制方法。
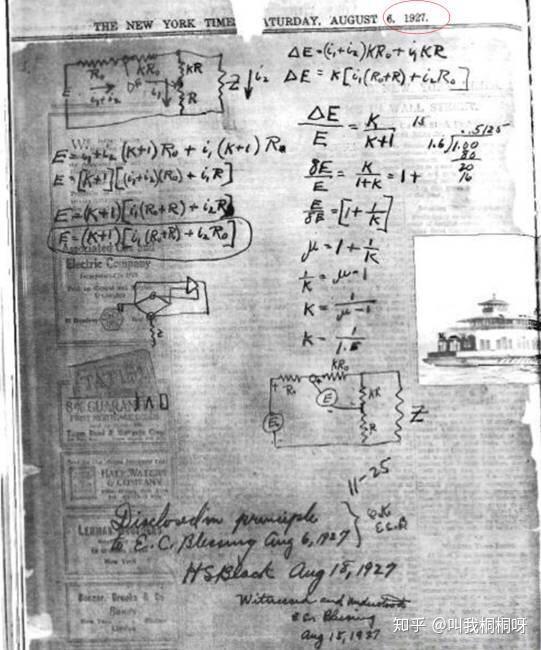
3)1927年,美国Bell实验室的工程师Harold Stephen Black (1898—1983)提出了高性能的负反馈放大器(Negative Feedback Amplifier),首次提出了负反馈控制这一重要思想。
4)1930年,信息时代的教父、美国MIT的科学家Vannevar Bush (1890—1974)研制出了世界上第一台大型模拟计算机(Differential Analyzer)。他是二战时期美国最伟大的科学家和工程师之一。
5)1932年,美籍瑞典物理学家Harry Nyquist (1889–1976)提出了在频域内研究系统特性的频率响应法,建立了以频率特性为基础的稳定性判据,为具有高质量的动态品质和静态准确度的军用控制系统提供了所需的分析工具。
6)1938年,美国科学家Hendrik Wade Bode (1905–1982)将频率响应法进行了系统研究,形成了经典控制理论的频域分析法。
7)1938年,美国数学家、电气工程师Claude Elwood Shannon (1916—2001)提出了继电器逻辑自动化理论,1948年发表了著名的论文《通讯的数学原理》,奠定了信息论的基础。
8)1942年,美国工程师John G. Ziegler (1909—1997)、Nathaniel B. Nichols (1914–1997)提出了著名的Ziegler–Nichols Method,是一种启发式的PID参数最佳调整法,迄今为止依然是工业界调整PID参数的主流方法。
9)1942年,控制论奠基人、美国应用数学家Norbert Wiener(1894—1964)提出了Wiener滤波理论。1947年,Wiener教授完成了划时代的著作《控制论》(Cybernetics),标志着控制论学科的诞生。该书给出了控制论的定义:Feedback is a method of controlling a system by inserting into it the result of its past performance。简单地说:控制论就是研究动物(包括人类)、自动机器和有机体的控制和通讯的理论。
10)1944年,美籍匈牙利数学家John von Neumann (1903—1957)创立了博弈论,并于1946年发明了世界首台数字计算机。他是20世纪最重要的数学家之一,在现代计算机、博弈论、核武器和生化武器等诸多领域内均有杰出建树,是最伟大的科学全才之一,被后人称为“计算机之父”和“博弈论之父”。
11)1948年,美国科学家Walter Richard Evans (1920—1999)创立了根轨迹分析方法Root Locus Method,为分析系统性能随系统参数变化的规律性提供了有力工具,被广泛应用于反馈控制系统的分析、设计中。建立在Nyquist频率响应法和Evans根轨迹法基础上的理论,称为经典控制理论,为工程技术人员提供了一个设计反馈控制系统的有效工具。
12)我国著名科学家钱学森院士将控制理论应用于工程实践,并于1954年出版了著名的《工程控制论》。
13)随后,多本经典控制理论名著相继出版,包括Smith的Automatic Control Engineering,Bode的Network Analysis and Feedback Amplifier,MacColl的Fundamental Theory of Servomechanisms以及钱学森的《工程控制论》。
现代控制
20世纪50年代中期,科学技术的发展,特别是空间技术的发展,迫切要求解决更复杂的多变量系统、非线性系统的最优控制问题(例如火箭和宇航器的导航、跟踪和着陆过程中的高精度、低消耗控制,到达目标的控制时间最小等)。实践的需求推动了控制理论的进步,计算机技术的发展也从计算手段上为控制理论的发展提供了条件。适合描述航天器的运动规律,又便于计算机求解的状态空间模型成为主要的模型形式。因此,60年代产生的现代控制理论是以状态变量概念为基础,利用现代数学方法和计算机来分析、综合复杂控制系统的新理论,适用于多输入、多输出、时变的、非线性系统。
1)1956年,著名的苏联数学家Lev Semyonovich Pontryagin (1908—1988)发表了“最优过程数学理论”,并于1961年证明并发表了著名的极大值原理。极大值原理和动态规划为解决最优控制问题提供了理论工具。
2)1957年,著名的美国数学家Richard Ernest Bellman (1920—1984)在兰德公司RAND Cooperation数学部的支持下,提出了离散多阶段决策的最优性原理,创立了动态规划方法,发表了著名的Dynamic Programming,建立了最优控制的理论基础。1979年,Bellman获得了IEEE荣誉勋章(IEEE Medal of Honor),获奖理由为:for contributions to decision processes and control system theoryparticularly the creation and application of dynamic programming。
3)1957年,国际自动控制联合会(International Federation of Automatic Control,IFAC)正式成立,中国为发起国之一,第一届学术会议于1960年在莫斯科召开。我国著名科学家钱学森院士为IFAC第一届执行委员会(Executive Council)委员。
4)1957年,苏联在拜科努尔航天基地成功发射了世界上第一颗人造地球卫星Sputnik。该事件标志着人类航天时代的来临,也直接导致了美国、苏联的航天技术竞赛。
5)1954年,美国发明家George Charles DevolJr. (1912—2011)研制出了第一台工业机器人样机;两年后,被称为工业机器人之父的美国物理学家Joseph Frederick Engelberger (1925—2015)创立了全球第一家机器人公司Unimation。
6)1958年,美籍伊拉克控制理论学家Eliahu Ibraham Jury发表了著名的论文“Sampled-Data Control System”,1964年提出了Z变换方法,建立了数字控制及数字信号处理的理论基础。
7)1960年,美籍匈牙利数学家Rudolf (Rudi) Emil Kálmán (1930—2016)发表了“On the General Theory of Control Systems”等标志性论文,引入了状态空间法分析系统,提出能控性、能观测性、最佳调节器和kalman滤波等概念,奠定了现代控制理论的基础。2009年,美国总统Barack Obama向Kálmán颁发了国家科学奖章。
8)1961年,苏联东方1号飞船载着世界上第一名航天员Gagarin (1934—1968)进入了人造地球卫星轨道,开启了人类宇航时代。
9)1963年,美国著名数学家、加州大学伯克利分校教授Lotfi Aliasker Zadeh与Charles A. Desoer合作发表了著名的论文“Linear System Theory: The State Space Approach”。1965年,Zadeh教授提出了模糊集合的概念,建立了模糊控制理论。
10)1966年,苏联成功发射了“月球9号”探测器,实现了探测器首次在月球表面成功软着陆;1969年,“阿波罗11号”成功地把美国宇航员Neil Alden Armstrong (1930—2012)送上了月球,实现了人类首次登陆月球,迈出了“人类的一大步”。
11)1967年,瑞典隆德大学教授Karl Johan Astrom提出了最小二乘辩识,解决了线性定常系统参数估计问题和定阶方法,提出了自启调节器,建立了自适应控制的理论基础,在自适应控制理论和应用方面作出了杰出贡献。Astrom于1993年获得了IEEE荣誉勋章。获奖理由:For fundamental contributions to theory and applications of adaptive control technology。
12)20世纪60年代,英国曼彻斯特大学教授Howard Harry Rosenbrock (1920—2010)和谢菲尔德大学教授David H. Owens研究了应用于计算机辅助控制系统设计的现代频域法理论,将经典控制理论传递函数的概念推广到多变量系统,探讨了传递函数矩阵与状态方程之间的等价转换关系,为建立统一的线性系统理论奠定了基础。1970年,Rosenbrock教授发表了经典著作《State Space and Multivariable Theory》。1982年,他获得了首届IEEE Control Systems Award,获奖理由:For contributions to multivariable control theory and design methods。
13)1969年,现代最优控制理论之父、斯坦福大学教授Arthur Earl BrysonJr.与美籍华裔科学家、哈佛大学教授何毓琦(Yu-Chi;Ho)合作发表了经典著作《Applied optimal control: optimizationestimation and control》。1984年,他获得了第2届IEEE Control Systems Award,获奖理由:For pioneering contributions to optimal control and estimation and their applications。
14)1971年,美国国防部计算机网络初步建成。
15)1974年,多伦多大学教授Walter Murray Wonham发表了经典著作《Linear Multivariable Control: A Geometric Approach》,并于1987年获得了IEEE Control Systems Award,获奖理由:For pioneering contributions to the theory of stochastic systemslinear multivariable controland discrete event systems。
16)1976年,美国控制理论学家、哈佛大学教授Roger Ware Brockett提出用微分几何研究非线性控制系统。并于1991年获得了IEEE Control Systems Award,获奖理由:For pioneering and innovative contributions to nonlinear controlstabilityrobotics and control engineering education。
17)1976年,日本Fanuc公司研制出了由加工中心和工业机器人组成的柔性制造单元。
18)1981年,加拿大麦吉尔大学教授George Zames (1934—1997)提出了H-infinity Methods,开辟了鲁棒控制理论。1985年,他获得了第3届IEEE Control Systems Award,获奖理由:For contributions to feedback stability theory and linear multivariable control system design。
19)1981年,美国“哥伦比亚”号航天飞机首次发射成功。
20)1983年,美籍华裔科学家、哈佛大学教授何毓琦与其学生曹希仁教授共同提出了离散事件系统理论,并于1991年共同发表了专著《Discrete Event Dynamic Systems and Perturbation Analysis》。何毓琦教授于1989年获得IEEE Control Systems Award,获奖理由:For contributions to differential gamesmulti-person decision makingand discrete event dynamic systems。
21)1985年,意大利罗马大学教授Alberto Isidori出版了专著《Nonlinear Control Systems》。于2012年获得了IEEE Control Systems Award,获奖理由:For pioneering contributions to nonlinear control theory。
22)1986年,中国批准了国家高技术研究发展计划(863计划),包括自动化领域的计算机集成制造系统和智能机器人两个主题。
23)1996年,第一台火星探测器Sojourner在火星表面成功软着陆。
24)美国宇航局研制的旅行者Voyager 1号、2号开始走出太阳系,对茫茫太空进行探索。
25)2001年,日本安川公司研制成功的机械狗
26)2002年,日本SONY公司开发出了二足步行机械人SDR-4X。
27)2003年,中国神舟5号宇宙飞船成功发射,将杨利伟少将送入了太空,中国首次载人航天圆满成功。标志着中国已经成为世界上独立自主地完整掌握载人航天技术的国家之一。
现代控制理论主要利用计算机作为系统建模、分析、设计乃至控制的手段,适用于多变量、非线性、时变系统。它在本质上是一种“时域法”,但并不是对经典频域法的从频率域回到时间域的简单再回归,而是立足于新的分析方法,有新目标的新理论。
现代控制理论研究内容非常广泛,主要包括三个基本内容:多变量线性系统理论、最优控制理论以及最优估计与系统辨识理论。从理论上解决了系统的能控性、能观测性、稳定性以及许多复杂系统的控制问题。
(来源EN电气,略有修改)
就业方向与发展
要想从事专业领域的工作首先得达到这个领域的标准,那么自动化人才的专业素质要求是怎样的呢?
自动化人才的专业素质
专业 素质(professional quality)是指一个人为了顺利从事某种具体的社会职业活动所必须具备的专门知识与技能,以及在社会职业活动中不断更新已有知识和技能的能力。
2012年教育部发布的《普通高等学校本科专业目录和专业介绍》,明确了自动化专业对学生的培养目标和要求,及毕业生应获得的专业知识和能力。参照该资料,具体的基本专业素质包括:
(1)掌握从事自动化领域工作所需的数学、物理等自然科学知识,以及电子电气、计算机与通信等技术基础知识,具有初步的人文与社会学的知识;
(2)掌握本专业中“信息、控制和系统"的基本原理,掌握信息处理的基本方法和优化设计的基本原理,了解学科前沿动态;
(3)掌握工程控制系统分析和设计的-.般方法,具有较熟练地解决工程现场一般控制系统问题的能力,具有能够独立从事工程实践中控制系统的运行、管理与维护的基本能力;
(4)具有对自动化系统或产品中的技术进行分析、改进、优化和独立设计的能力;
(5)具有创新意识和对自动化新产品、新工艺、新技术和新设备进行研究、开发和设计的初步能力;
(6)了解自动化专业领域技术标准和相关行业的法规。
因此,从专业素质来看,每个自动化专业学生,都要有知识、能力和素质的具体体现。即通过自动化专业(四年)的培养,他们应具备自动化领域基本完整的基础知识结构,实践和创新的基本能力及成为工程师或科学家的基本素质。
自动化人才的对口岗位
本专业学生毕业后能从事有关运动控制、过程控制、制造系统自动化、自动化仪表和设备、机器人控制、智能监控系统、智能交通、智能建筑、物联网等方面的工程设计、技术开发、系统运行管理与维护、企业管理与决策、科学研究和教学等工作。就业领域也非常宽广,包括高科技公司、科研院所、大专院校、金融、通信、税务、外贸、工商、铁道、民航、海关、工矿企业、现代农业、国防及政府和科技部门等。
(来源:2012年教育部发布的《普通高等学校本科专业目录和专业介绍》)
结语:
这些年来随着工业4.0和人工智能的兴起,自动化专业已经越来越多的往智能化化的方向走了,也就是说自动化并不是一个吃老本的专业,对知识更新换代的要求也是很高的。
之前我有看到一些知友总说自动化本科没用学了都是白学,其实并不是的,自动化培养的是一种系统思维,也就是说,将所有工程领域可知的技术进行消化吸收,最后通过自己的思维进行整合,从而对“控制”有一个全面的认知。
另外,要知道自动化学得好的人比一般专业好太多了,由于培养了系统思维,所以他们大部分不是总工程师就是项目经理,亦或者老板,总之自动化不可小觑。
推荐从宏观上了解自动化的书(需有一定基础,建议研究生阶段阅读):
- 《控制论》(Cybernetics)这本书是控制论的创始人诺伯特·维纳(Norbert Wiener,1894-1964)在1948年出版的、关于控制论的奠基性和标志性经典著作。
- 《工程控制论》原名Engineering Cyberetics,作者H s. Tsien(钱学森),由美国MeGraw Hill 于1954年出版。后来被翻译成中文,科学出版社出版,曾荣获中国科学院1956年一等科学奖。 钱学森在《工程控制论》中首创地把控制论推广到工程技术领域,是控制论的一部经典 著作,另有德文、俄文译本。该书把一般性概括性的理论和实际工程经验很好地结合起来,对工程技术各个系统的自动控制和自动调节理论作了一个全面的探讨;它-方 面奠定了工程控制论这门技 术科学的理论基础;另- . 方面指出这门新学科今后的几个研究方向。
- 《动态规划》(Dynamic Prammng)是1957 年贝尔曼(R. Bllman)出版的动态规划领域的第一本著作。动态规划是运筹学的一个分支, 是一种求 解多级决策过程最优化的数学方法。20 世纪50年代初美国数学家贝尔曼等人在研究多阶段决策过程的优化问题时,提出了著名的最优化原理,把多阶段过程转化为-系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法动态规划。
参考文献:《自动化导论》,科学出版社;2005,自动化学科(专业)的知识结构与知识体系解析,中国大学教学;2007,论自动化专业本科生的知识、素质与能力要求,电气电子教学学报;
分割线
更新:2019年6月27日
哇哇,真的很开心,从昨天开始一下子涨了几百个赞,还有很对粉丝私聊我,谢谢辣。
对于评论我有几点想回答
- 我一开始写这篇回答的时候真不知道是面向高三,以为单纯是自动化的专用介绍,所以我在学校方面推荐的比较少
- 还有就是我觉得知乎不单单是985 211的知乎,其实更有一些普通一本或者二本他们也很喜欢自动化这个专业,更应该给他们多点关注
- 其次就是关于为什么这么多计算机的课, 这个是因为每个学校的课程安排不一样,而且这些计算机的课大多数是选修,必修的课都一样
- 其实我也是一名在校大学生对自动化了解得也不是特别透彻 还希望前辈发现问题能及时提出
- 另外,我不是那种纯理工生,我觉得我还是很多喜欢的,可以的话关注一下呗(不要脸)
- 希望你们能够真的喜欢上自动化,其实自动化真的很有趣hhh
分割线
更新:2019年6月30日
看到小伙伴私信我说问我什么学校好,说实话真的很难建议,毕竟是考大学是你人生的目标,高中班主任也很难给你建议,所以,,嗯,你懂的。。
另外,hhh,点赞数真的好多,我在想什么时候才能破1k呢,破1k裸奔,噗噗噗......
een,还有一个关于数理,我学的不好能学自动化吗,有影响吗?这也许是很多毕业生想知道的,我到底,暑假要不要提前看高等数学,大学物理?
对于这个问题,我专门写了一个回答,内容挺详细,从考试和应用上分析了这个问题。
如下:
点进去,你就会发现,嗯,你看了就知道,哈哈哈