11.1 动捕技术发展史
11.1 动捕技术发展史
在本节中,我们将为大家介绍动捕技术的诞生、演变和发展。
11.1.1 动捕的诞生
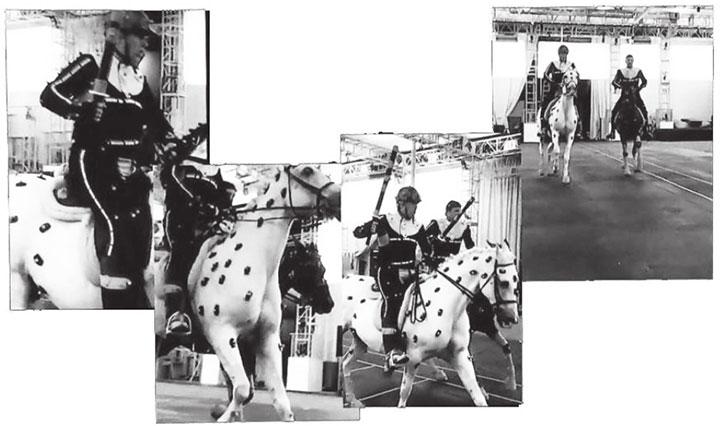
由于动捕采集的数据可以广泛应用于虚拟现实、游戏、人体工程学研究、模拟训练、生物力学研究等领域,因此这项技术拥有比较广泛的市场前景和价值。实际上从泛一点的角度来说,动捕是一个比较通用的概念,它并不限定捕捉的对象—除了人和物体,也可以是其他生物或者个体的局部,例如《刺客信条:起源》中对马匹应用动捕技术,如图 11-1 所示。
 加载中...
加载中...
图 11-1 对马匹应用动捕技术
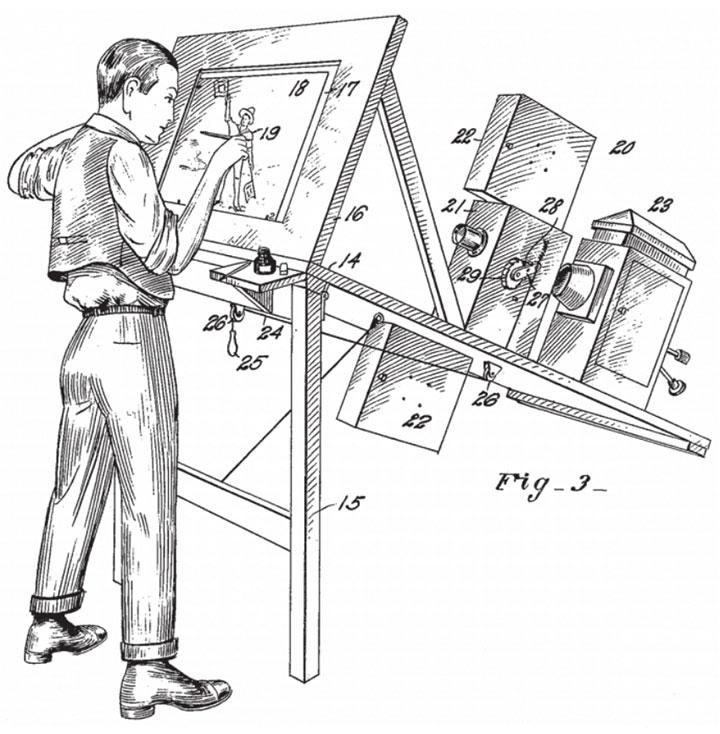
对于动捕,读者也许会比较陌生,但是应用了动捕技术的电影《金刚》《指环王》《泰坦尼克号》与《阿凡达》想必大家都耳熟能详。动捕技术早在二十世纪八九十年代就已经活跃在电影行业。而动捕的发源,最早可以追溯到 1914 年,动画师 Max Fleischer 发明了「动态影像临摹」(Rotoscoping)技术,应用作品包括迪士尼在 1937 年推出的《白雪公主与七个小矮人》;1958 年日本制作的一部以中国民间传说为主题的动画电影《白蛇传》,如图 11-2 所示。
 加载中...
加载中...
图 11-2 动态影像临摹技术
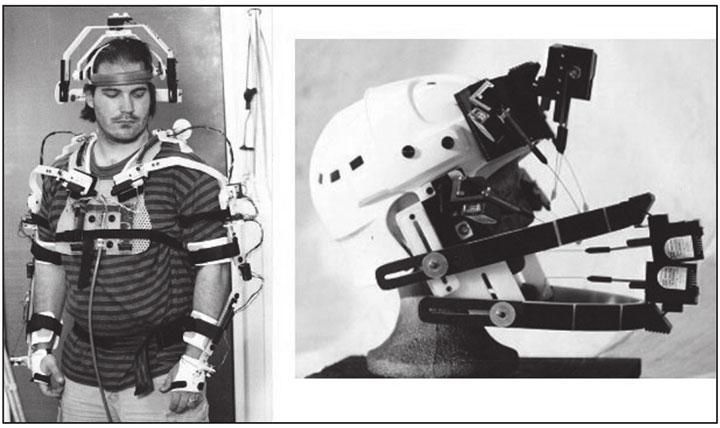
1983 年,思蒙弗雷泽大学的 Tom Calvert 在物理机械捕捉服装上取得的重大突破,让人们见识到了最早的机械类捕捉,而后一套名为 Waldo 的 PDI 机电捕捉系统在任天堂的 MarioAvatar 中使用,并被带到展会和人们进行互动,从此声名大噪。基于这套系统,Waldo 研发了第一套外骨骼捕捉系统。同时期,麻省理工推出了一套基于 LED 的「木偶图像化」(Graphical Marionetter)系统,这是光学动捕系统的雏形,如图 11-3 所示。
 加载中...
加载中...
图 11-3 早期动捕装备示意图
随着动捕技术的发展,光学动捕系统和惯性动捕系统逐渐成为影视、游戏等的核心技术。起初,光学动捕只在摄影棚中使用,演员穿着紧身衣在单调的设置场景里通过特殊的相机和灯光进行动捕。到了电影《指环王》,动捕技术从摄影棚被带到了拍摄片场,动捕演员的先驱安迪瑟金斯化身为咕噜和其他演员进行互动,如图 11-4 所示。
 加载中...
加载中...
图 11-4 《指环王》中咕噜的动捕
11.1.2 百家争鸣的动捕时代
时至今日,动捕技术已经被广泛地应用于影视拍摄、体育分析和医疗康复等领域。在中国,不少国产品牌获得了国内开发团队的青睐,多样化的产品形成了一系列具有完全自主知识产权的低成本、高精度的动捕系统。随着近年来虚拟现实技术的发展以及动捕方案成本的降低,动捕需求越来越多。需求的转化促进了虚拟现实与动捕方案的结合,在这样的环境下,诸多动捕设备商做了针对虚拟现实开发的适配:Optitrack 推出了与三星 Gear VR 以及 Occulus CV1 和 DK2 的设备适配的方案;Manus VR 设计了可以在 HTC Vive 这种 VR 头显设备中协同使用的蓝牙手套;诺亦腾也发布了国内第一套虚拟现实光惯混合捕捉解决方案—Project Alice 等。
首先大家需要明白动捕的基础原理。动捕的本质是测量、跟踪并且记录物体(传感器、反光点等)在空间的运动轨迹。一般由定位装置(IMU、反光点等)向信号获取装置(例如:高分辨率的红外相机、IMU 信号接收 Hub、激光光塔等)提供空间位置、旋转角速度、陀螺仪方向等信息,然后由信号获取装置将捕获的信息传输到计算机,在计算机内通过对应的数据处理软件进行数据处理和姿态还原,最后通过预设的模型做可视化的回放或者记录。这个过程的核心在于定位装置与最后的数据计算处理。以人的动作为例,当前的主流算法都是通过逆向运动学(Inverse Kinematics,IK)和正向运动学(Forward Kinematics,FK)进行计算的。FK 可以比较自然地实现运动状态,IK 可以在程序中实时生成骨骼模型的关键帧,这样就可以使角色根据外界环境实时做出的动作看起来更加真实。因为二者互补,所以我们常常混用 FK 和 IK(FK/IK blend)。关于这两种算法的具体区别,读者可以查阅论文和相关信息,此处不再赘述。